Intel RealSense D435 – Ubuntu 19 de febrero de 2019
Posted by Jorge in robotica, ROS.Tags: d435, driver, firmware, intel, realsense, ubuntu, update
add a comment
Por desgracia, la cámara que presenta Intel, no es Plug&Play en Ubuntu y ROS.
Para poder utilizarla correctamente es necesario actualizar el firmware lo primero de todo. Los pasos para realizar esto se pueden encontrar en este PDF de Intel. El proceso que debemos realizar se conoce como Device Firmware Update o DFU.
Lo primero que tenemos que hacer es abrir un terminal (CTRL+ALT+T).
A continuación agregamos el repositorio de Intel
echo 'deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenialmain' | sudo tee /etc/apt/sources.list.d/realsense-public.list
El siguiente paso es agregar la llave pública:
sudo apt-key adv--keyserverkeys.gnupg.net --recv-key 6F3EFCDE
Seguidamente actualizaremos los repositorios para poder encontrar los paquetes necesarios para la RealSense y el DFU
Si tenemos un error que indica que el repositorio no existe o no se puede encontrar la llave:
jorge@silth:~/ws/realsense_ws$ sudo apt-key adv --keyserver hkp://keys.gnupg.net:80 --recv-keys 6F3EFCDE
Executing: /tmp/tmp.fe7CH55mwJ/gpg.1.sh --keyserver hkp://keys.gnupg.net:80 --recv-keys 6F3EFCDE
gpg: requesting key 6F3EFCDE from hkp server keys.gnupg.net
gpgkeys: key 6F3EFCDE can't be retrieved
gpg: no valid OpenPGP data found.
gpg: Total number processed: 0
gpg: keyserver communications error: keyserver helper general error
gpg: keyserver communications error: unknown pubkey algorithm
gpg: keyserver receive failed: unknown pubkey algorithm
Para resolver este caso es necesario copiar la llave directamente desde el servidor a un fichero en nuestro ordenador.
La llave la podemos encontrar en la siguiente dirección.
A continuación creamos un fichero (en el directorio donde queramos, yo en mi caso en el directorio home) con extensión PUB y con el contenido de la llave. El fichero debe de quedar de la siguiente forma:
dfsdfsd
El siguiente paso es incluir la llave, para ello debemos indicar el directorio donde tenemos la llave:
sudo apt-key add ~/intel_key.pub
Y de nuevo ejecutamos un update para incluir el nuevo repositorio.
Si se ha actulizado todo correctamente, instalaremos el paquete DFU.
sudo apt install intel-real-sense-DFU
Después, necesitamos descargar el último firmware disponible (.bin)
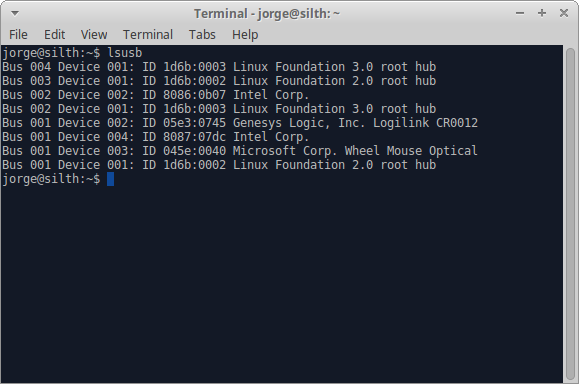
Ahora toca el paso de la actualización del firmware. Para ello, previamente es necesario saber el puerto donde está conectada la RealSense, emplearemos el comando lsusb. En mi ordenador está conectada al bus USB 002 como device 002.
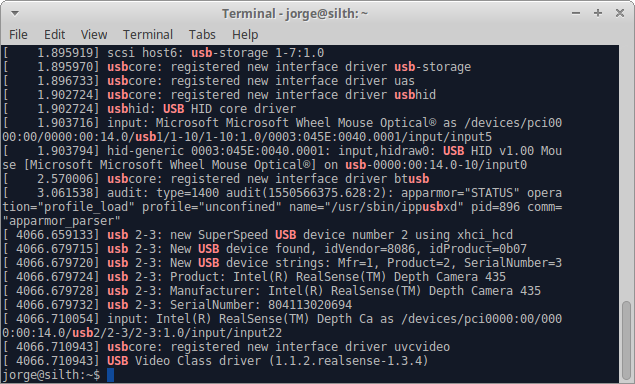
Si queremos obtenerlo de una forma más detallado podemos emplear el comando dmesg | grep -i usb
Para poder actualizar el firmware emplearemos el siguiente comando, donde el parámetro -b indica el bus usb y el -d el device. En mi caso sería -b 002 y -d 002.
intel-realsense-dfu–b 002 –d 002 –f –i /home/TU_USUARIO/downloads/Signed_Image_UVC_5_9_2_0.bin
El proceso comenzará y nos mostrará el mensaje Done! cuando finalice correctamente.
Para comprobar que el proceso se ha realizado correctamente podemos revisar la versión del firmware con el siguiente comando:
intel-realsense-dfu -p
Por último, podemos lanzar realsense-viewer para visualizar la cámara.

